Base publication wrapper class, used in list traversal of various publications. More...
#include <Publication.hpp>
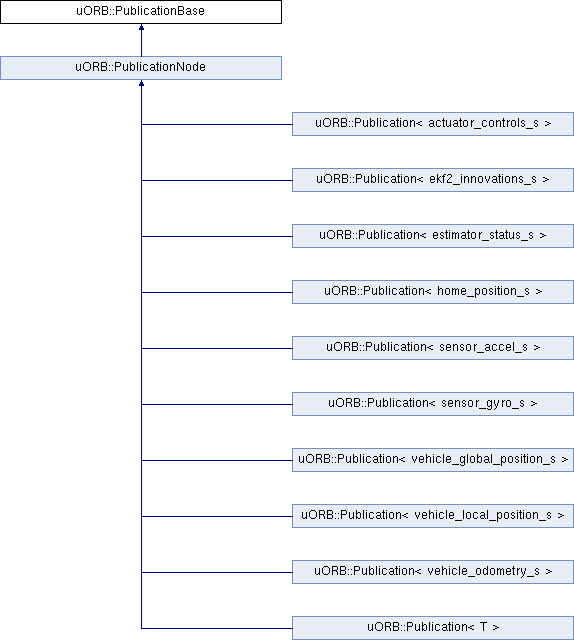
Inheritance diagram for uORB::PublicationBase:
Public Member Functions | |
| PublicationBase (const struct orb_metadata *meta, int priority=-1) | |
| Constructor. More... | |
| PublicationBase (const PublicationBase &)=delete | |
| PublicationBase & | operator= (const PublicationBase &)=delete |
| PublicationBase (PublicationBase &&)=delete | |
| PublicationBase & | operator= (PublicationBase &&)=delete |
| bool | update (void *data) |
| Update the struct. More... | |
Protected Attributes | |
| const struct orb_metadata * | _meta |
| const int | _priority |
| orb_advert_t | _handle {nullptr} |
Detailed Description
Base publication wrapper class, used in list traversal of various publications.
Constructor & Destructor Documentation
§ PublicationBase()
| uORB::PublicationBase::PublicationBase | ( | const struct orb_metadata * | meta, |
| int | priority = -1 |
||
| ) |
Constructor.
- Parameters
-
meta The uORB metadata (usually from the ORB_ID() macro) for the topic. priority The priority for multi pub/sub, 0-based, -1 means don't publish as multi
Member Function Documentation
§ update()
| bool uORB::PublicationBase::update | ( | void * | data | ) |
Update the struct.
- Parameters
-
data The uORB message struct we are updating.
The documentation for this class was generated from the following files:
- src/modules/uORB/Publication.hpp
- src/modules/uORB/Publication.cpp
