A sensor bridge class must implement this interface. More...
#include <sensor_bridge.hpp>
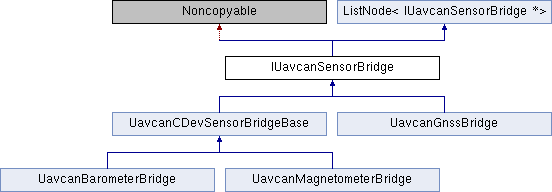
Inheritance diagram for IUavcanSensorBridge:
Public Member Functions | |
| virtual const char * | get_name () const =0 |
| Returns ASCII name of the bridge. | |
| virtual int | init ()=0 |
| Starts the bridge. More... | |
| virtual unsigned | get_num_redundant_channels () const =0 |
| Returns number of active redundancy channels. | |
| virtual void | print_status () const =0 |
| Prints current status in a human readable format to stdout. | |
 Public Member Functions inherited from ListNode< IUavcanSensorBridge *> Public Member Functions inherited from ListNode< IUavcanSensorBridge *> | |
| void | setSibling (IUavcanSensorBridge * sibling) |
| const IUavcanSensorBridge * | getSibling () const |
Static Public Member Functions | |
| static void | make_all (uavcan::INode &node, List< IUavcanSensorBridge *> &list) |
| Sensor bridge factory. More... | |
Static Public Attributes | |
| static constexpr unsigned | MAX_NAME_LEN = 20 |
Additional Inherited Members | |
| Protected Attributes inherited from ListNode< IUavcanSensorBridge *> | |
| IUavcanSensorBridge * | _sibling |
Detailed Description
A sensor bridge class must implement this interface.
Member Function Documentation
§ init()
|
pure virtual |
Starts the bridge.
- Returns
- Non-negative value on success, negative on error.
Implemented in UavcanGnssBridge, UavcanBarometerBridge, and UavcanMagnetometerBridge.
§ make_all()
|
static |
Sensor bridge factory.
Creates all known sensor bridges and puts them in the linked list.
The documentation for this class was generated from the following files:
- src/drivers/uavcan/sensors/sensor_bridge.hpp
- src/drivers/uavcan/sensors/sensor_bridge.cpp
