This is the base class for redundant sensors with an independent ORB topic per each redundancy channel. More...
#include <sensor_bridge.hpp>
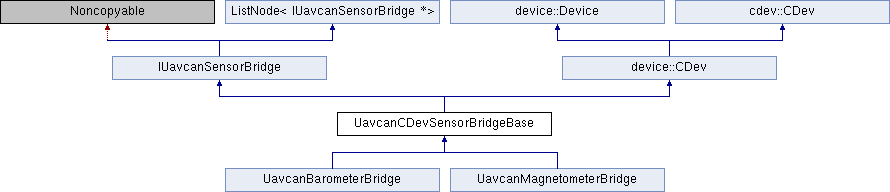
Inheritance diagram for UavcanCDevSensorBridgeBase:
Public Member Functions | |
| unsigned | get_num_redundant_channels () const override |
| Returns number of active redundancy channels. | |
| void | print_status () const override |
| Prints current status in a human readable format to stdout. | |
 Public Member Functions inherited from IUavcanSensorBridge Public Member Functions inherited from IUavcanSensorBridge | |
| virtual const char * | get_name () const =0 |
| Returns ASCII name of the bridge. | |
| virtual int | init ()=0 |
| Starts the bridge. More... | |
| Public Member Functions inherited from ListNode< IUavcanSensorBridge *> | |
| void | setSibling (IUavcanSensorBridge * sibling) |
| const IUavcanSensorBridge * | getSibling () const |
| Public Member Functions inherited from device::CDev | |
| CDev (const char *name, const char *devname) | |
| Constructor. More... | |
| virtual int | init () |
| virtual int | ioctl (file_t *filep, int cmd, unsigned long arg) |
| Perform an ioctl operation on the device. More... | |
| Public Member Functions inherited from device::Device | |
| virtual | ~Device ()=default |
| Destructor. More... | |
| virtual int | read (unsigned address, void *data, unsigned count) |
| Read directly from the device. More... | |
| virtual int | write (unsigned address, void *data, unsigned count) |
| Write directly to the device. More... | |
| virtual int | ioctl (unsigned operation, unsigned &arg) |
| Perform a device-specific operation. More... | |
| uint8_t | get_device_bus () const |
| Return the bus ID the device is connected to. More... | |
| uint32_t | get_device_id () const |
| DeviceBusType | get_device_bus_type () const |
| Return the bus type the device is connected to. More... | |
| uint8_t | get_device_address () const |
| Return the bus address of the device. More... | |
| void | set_device_address (int address) |
| void | set_device_type (uint8_t devtype) |
| Set the device type. More... | |
| virtual bool | external () |
| Public Member Functions inherited from cdev::CDev | |
| CDev (const char *devname) | |
| Constructor. More... | |
| virtual int | open (file_t *filep) |
| Handle an open of the device. More... | |
| virtual int | close (file_t *filep) |
| Handle a close of the device. More... | |
| virtual ssize_t | read (file_t *filep, char *buffer, size_t buflen) |
| Perform a read from the device. More... | |
| virtual ssize_t | write (file_t *filep, const char *buffer, size_t buflen) |
| Perform a write to the device. More... | |
| virtual off_t | seek (file_t *filep, off_t offset, int whence) |
| Perform a logical seek operation on the device. More... | |
| virtual int | poll (file_t *filep, px4_pollfd_struct_t *fds, bool setup) |
| Perform a poll setup/teardown operation. More... | |
| const char * | get_devname () const |
| Get the device name. More... | |
Protected Member Functions | |
| UavcanCDevSensorBridgeBase (const char *name, const char *devname, const char *class_devname, const orb_id_t orb_topic_sensor, const unsigned max_channels=DEFAULT_MAX_CHANNELS) | |
| void | publish (const int node_id, const void *report) |
| Sends one measurement into appropriate ORB topic. More... | |
| Protected Member Functions inherited from device::Device | |
| Device (const char *name) | |
| Device (DeviceBusType bus_type, uint8_t bus, uint8_t address, uint8_t devtype=0) | |
| Device (const Device &)=delete | |
| Device & | operator= (const Device &)=delete |
| Device (Device &&)=delete | |
| Device & | operator= (Device &&)=delete |
| Protected Member Functions inherited from cdev::CDev | |
| virtual pollevent_t | poll_state (file_t *filep) |
| Check the current state of the device for poll events from the perspective of the file. More... | |
| virtual void | poll_notify (pollevent_t events) |
| Report new poll events. More... | |
| virtual void | poll_notify_one (px4_pollfd_struct_t *fds, pollevent_t events) |
| Internal implementation of poll_notify. More... | |
| virtual int | open_first (file_t *filep) |
| Notification of the first open. More... | |
| virtual int | close_last (file_t *filep) |
| Notification of the last close. More... | |
| virtual int | register_class_devname (const char *class_devname) |
| Register a class device name, automatically adding device class instance suffix if need be. More... | |
| virtual int | unregister_class_devname (const char *class_devname, unsigned class_instance) |
| Register a class device name, automatically adding device class instance suffix if need be. More... | |
| void | lock () |
| Take the driver lock. More... | |
| void | unlock () |
| Release the driver lock. | |
Static Protected Attributes | |
| static constexpr unsigned | DEFAULT_MAX_CHANNELS = 5 |
| Static Protected Attributes inherited from cdev::CDev | |
| static const px4_file_operations_t | fops = {} |
| Pointer to the default cdev file operations table; useful for registering clone devices etc. | |
Additional Inherited Members | |
| Public Types inherited from device::Device | |
| enum | DeviceBusType { DeviceBusType_UNKNOWN = 0, DeviceBusType_I2C = 1, DeviceBusType_SPI = 2, DeviceBusType_UAVCAN = 3 } |
| Device bus types for DEVID. | |
| Static Public Member Functions inherited from IUavcanSensorBridge | |
| static void | make_all (uavcan::INode &node, List< IUavcanSensorBridge *> &list) |
| Sensor bridge factory. More... | |
| Static Public Member Functions inherited from device::Device | |
| static const char * | get_device_bus_string (DeviceBusType bus) |
| static int | device_id_print_buffer (char *buffer, int length, uint32_t id) |
| Print decoded device id string to a buffer. More... | |
| Static Public Attributes inherited from IUavcanSensorBridge | |
| static constexpr unsigned | MAX_NAME_LEN = 20 |
| Protected Attributes inherited from ListNode< IUavcanSensorBridge *> | |
| IUavcanSensorBridge * | _sibling |
| Protected Attributes inherited from device::CDev | |
| bool | _pub_blocked {false} |
| true if publishing should be blocked | |
| Protected Attributes inherited from device::Device | |
| union DeviceId | _device_id |
| device identifier information | |
| const char * | _name |
| driver name | |
| bool | _debug_enabled {false} |
| if true, debug messages are printed | |
| Protected Attributes inherited from cdev::CDev | |
| px4_sem_t | _lock |
| lock to protect access to all class members (also for derived classes) | |
Detailed Description
This is the base class for redundant sensors with an independent ORB topic per each redundancy channel.
For example, sensor_mag0, sensor_mag1, etc.
Member Function Documentation
§ publish()
|
protected |
Sends one measurement into appropriate ORB topic.
New redundancy channels will be registered automatically.
- Parameters
-
node_id Sensor's Node ID report Pointer to ORB message object
The documentation for this class was generated from the following files:
- src/drivers/uavcan/sensors/sensor_bridge.hpp
- src/drivers/uavcan/sensors/sensor_bridge.cpp
