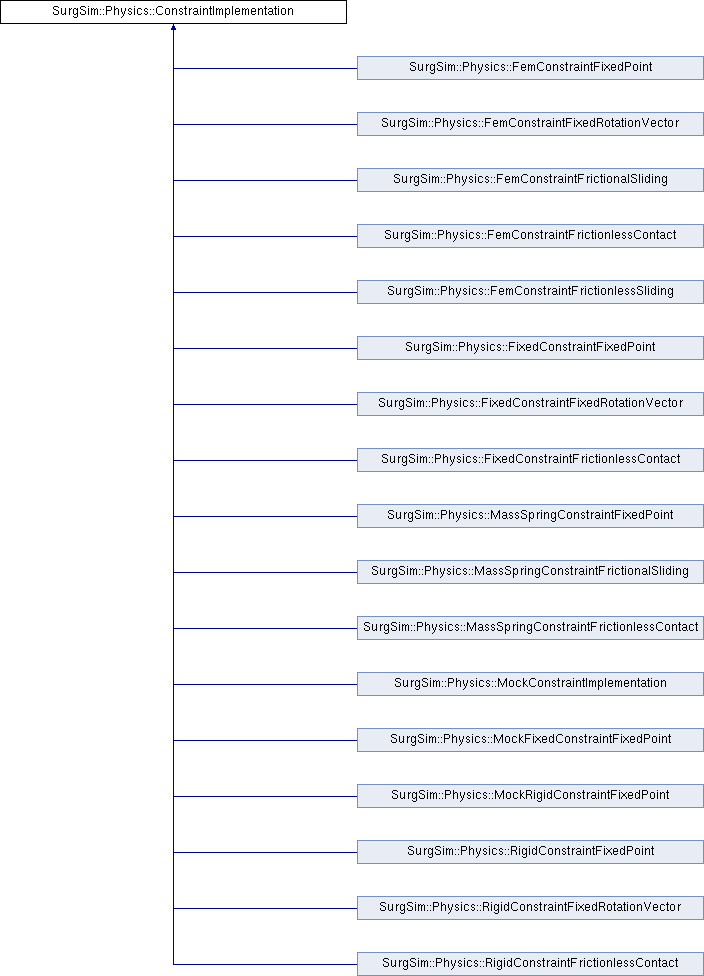
Base class for all constraint implementations. A ConstraintImplementation defines 1 side of a constraint.
More...
#include <ConstraintImplementation.h>
|
|
Eigen::SparseVector< double, Eigen::RowMajor, ptrdiff_t > | m_newH |
| | Preallocated variable for derived implementations of doBuild.
|
| |
Base class for all constraint implementations. A ConstraintImplementation defines 1 side of a constraint.
§ build()
| void SurgSim::Physics::ConstraintImplementation::build |
( |
double |
dt, |
|
|
const ConstraintData & |
data, |
|
|
const std::shared_ptr< Localization > & |
localization, |
|
|
MlcpPhysicsProblem * |
mlcp, |
|
|
size_t |
indexOfRepresentation, |
|
|
size_t |
indexOfConstraint, |
|
|
ConstraintSideSign |
sign |
|
) |
| |
Builds the subset of an Mlcp physics problem associated to this implementation.
- Parameters
-
| dt | The time step |
| data | The data associated to the constraint |
| localization | The localization for this implementation |
| [in,out] | mlcp | The Mixed LCP physics problem to fill up |
| indexOfRepresentation | The index of the representation (associated to this implementation) in the mlcp |
| indexOfConstraint | The index of the constraint in the mlcp |
| sign | The sign of this implementation in the constraint (positive or negative side) |
§ getConstraintType()
| virtual SurgSim::Physics::ConstraintType SurgSim::Physics::ConstraintImplementation::getConstraintType |
( |
| ) |
const |
|
pure virtual |
Gets the constraint type for this ConstraintImplementation.
- Returns
- The constraint type corresponding to this constraint implementation
Implemented in SurgSim::Physics::MockConstraintImplementation, SurgSim::Physics::MockRigidConstraintFixedPoint, SurgSim::Physics::MockFixedConstraintFixedPoint, SurgSim::Physics::MassSpringConstraintFrictionlessContact, SurgSim::Physics::RigidConstraintFrictionlessContact, SurgSim::Physics::FixedConstraintFrictionlessContact, SurgSim::Physics::FixedConstraintFixedPoint, SurgSim::Physics::RigidConstraintFixedPoint, SurgSim::Physics::FixedConstraintFixedRotationVector, SurgSim::Physics::RigidConstraintFixedRotationVector, SurgSim::Physics::MassSpringConstraintFixedPoint, SurgSim::Physics::FemConstraintFrictionlessContact, SurgSim::Physics::MassSpringConstraintFrictionalSliding, SurgSim::Physics::FemConstraintFixedPoint, SurgSim::Physics::FemConstraintFixedRotationVector, SurgSim::Physics::FemConstraintFrictionalSliding, and SurgSim::Physics::FemConstraintFrictionlessSliding.
§ getFactory()
- Returns
- The static class factory that contains the implementations for a given Representation type.
§ getNumDof()
| size_t SurgSim::Physics::ConstraintImplementation::getNumDof |
( |
| ) |
const |
Gets the number of degree of freedom for this implementation.
- Returns
- The number of degree of freedom for this implementation
The documentation for this class was generated from the following files: