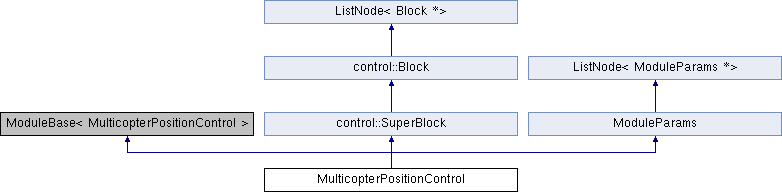
Inheritance diagram for MulticopterPositionControl:
Public Member Functions | |
| void | run () override |
| int | print_status () override |
 Public Member Functions inherited from control::SuperBlock Public Member Functions inherited from control::SuperBlock | |
| SuperBlock (SuperBlock *parent, const char *name) | |
| SuperBlock (const SuperBlock &)=delete | |
| SuperBlock & | operator= (const SuperBlock &)=delete |
| SuperBlock (SuperBlock &&)=delete | |
| SuperBlock & | operator= (SuperBlock &&)=delete |
| void | setDt (float dt) override |
| void | updateParams () override |
| void | updateSubscriptions () override |
| void | updatePublications () override |
| Public Member Functions inherited from control::Block | |
| Block (SuperBlock *parent, const char *name) | |
| Block (const Block &)=delete | |
| Block & | operator= (const Block &)=delete |
| Block (Block &&)=delete | |
| Block & | operator= (Block &&)=delete |
| void | getName (char *name, size_t n) |
| float | getDt () |
| Public Member Functions inherited from ListNode< Block *> | |
| void | setSibling (Block * sibling) |
| const Block * | getSibling () const |
| Public Member Functions inherited from ModuleParams | |
| ModuleParams (ModuleParams *parent) | |
| void | setParent (ModuleParams *parent) |
| Sets the parent module. More... | |
| ModuleParams (const ModuleParams &)=delete | |
| ModuleParams & | operator= (const ModuleParams &)=delete |
| ModuleParams (ModuleParams &&)=delete | |
| ModuleParams & | operator= (ModuleParams &&)=delete |
| Public Member Functions inherited from ListNode< ModuleParams *> | |
| void | setSibling (ModuleParams * sibling) |
| const ModuleParams * | getSibling () const |
Static Public Member Functions | |
| static int | task_spawn (int argc, char *argv[]) |
| static MulticopterPositionControl * | instantiate (int argc, char *argv[]) |
| static int | custom_command (int argc, char *argv[]) |
| static int | print_usage (const char *reason=nullptr) |
Additional Inherited Members | |
| Protected Member Functions inherited from control::SuperBlock | |
| List< Block * > & | getChildren () |
| void | updateChildParams () |
| void | updateChildSubscriptions () |
| void | updateChildPublications () |
| Protected Member Functions inherited from control::Block | |
| virtual void | updateParamsSubclass () |
| SuperBlock * | getParent () |
| List< uORB::SubscriptionNode * > & | getSubscriptions () |
| List< uORB::PublicationNode * > & | getPublications () |
| List< BlockParamBase * > & | getParams () |
| Protected Member Functions inherited from ModuleParams | |
| virtual void | updateParams () |
| Call this method whenever the module gets a parameter change notification. More... | |
| virtual void | updateParamsImpl () |
| The implementation for this is generated with the macro DEFINE_PARAMETERS() | |
| Protected Attributes inherited from control::SuperBlock | |
| List< Block * > | _children |
| Protected Attributes inherited from control::Block | |
| const char * | _name |
| SuperBlock * | _parent |
| float | _dt {0.0f} |
| List< uORB::SubscriptionNode * > | _subscriptions |
| List< uORB::PublicationNode * > | _publications |
| List< BlockParamBase * > | _params |
| Protected Attributes inherited from ListNode< Block *> | |
| Block * | _sibling |
| Protected Attributes inherited from ListNode< ModuleParams *> | |
| ModuleParams * | _sibling |
Member Function Documentation
§ custom_command()
|
static |
- See also
- ModuleBase
§ instantiate()
|
static |
- See also
- ModuleBase
§ print_status()
|
override |
- See also
- ModuleBase::print_status()
§ print_usage()
|
static |
- See also
- ModuleBase
§ run()
|
override |
- See also
- ModuleBase::run()
§ task_spawn()
|
static |
- See also
- ModuleBase
The documentation for this class was generated from the following file:
- src/modules/mc_pos_control/mc_pos_control_main.cpp
