|
Regilo
A simple C++ library for controlling the Neato XV robot and the Hokuyo scanner.
|
|
Regilo
A simple C++ library for controlling the Neato XV robot and the Hokuyo scanner.
|
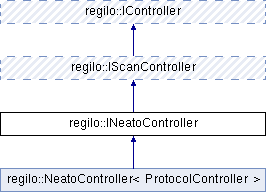
The INeatoController interface is used for the NeatoController class. More...
#include <neatocontroller.hpp>
Public Member Functions | |
| virtual | ~INeatoController ()=default |
| Default destructor. | |
| virtual bool | getTestMode () const =0 |
| Get whether the Neato is in the test mode. More... | |
| virtual void | setTestMode (bool testMode)=0 |
| Set or unset the test mode. More... | |
| virtual bool | getLdsRotation () const =0 |
| Get whether the Neato has LDS rotation on or off. More... | |
| virtual void | setLdsRotation (bool ldsRotation)=0 |
| Set LDS rotation on or off. More... | |
| virtual void | setMotor (int left, int right, int speed)=0 |
| Set the specified motor to run in a direction at a requested speed. More... | |
| virtual std::string | getTime ()=0 |
| Get the current scheduler time. More... | |
 Public Member Functions inherited from regilo::IScanController Public Member Functions inherited from regilo::IScanController | |
| virtual | ~IScanController ()=default |
| Default destructor. | |
| virtual ScanData | getScan (bool fromDevice=true)=0 |
| Get a scan from the device. More... | |
| Public Member Functions inherited from regilo::IController | |
| virtual | ~IController ()=default |
| Default destructor. | |
| virtual void | connect (const std::string &endpoint)=0 |
| Connect the controller to a device. More... | |
| virtual bool | isConnected () const =0 |
| Test if the controller is connected. More... | |
| virtual std::string | getEndpoint () const =0 |
| Get the endpoint of device. More... | |
| virtual std::shared_ptr< ILog > | getLog ()=0 |
| Get the current Log. More... | |
| virtual std::shared_ptr< const ILog > | getLog () const =0 |
| Get the current Log (a const variant). More... | |
| virtual void | setLog (std::shared_ptr< ILog > log)=0 |
| Set a Log (it can be shared between more controllers). More... | |
| virtual std::string | sendCommand (const std::string &command)=0 |
| Send a command to the device. More... | |
The INeatoController interface is used for the NeatoController class.
|
pure virtual |
Get whether the Neato has LDS rotation on or off.
Implemented in regilo::NeatoController< ProtocolController >.
|
pure virtual |
Get whether the Neato is in the test mode.
Implemented in regilo::NeatoController< ProtocolController >.
|
pure virtual |
Get the current scheduler time.
Implemented in regilo::NeatoController< ProtocolController >.
|
pure virtual |
Set LDS rotation on or off.
| ldsRotation | True for starting the LIDAR rotation. |
Implemented in regilo::NeatoController< ProtocolController >.
|
pure virtual |
Set the specified motor to run in a direction at a requested speed.
| left | Distance in millimeters to drive the left wheel (pos = forward, neg = backward). |
| right | Distance in millimeters to drive the right wheel (pos = forward, neg = backward). |
| speed | Speed in millimeters/second. |
Implemented in regilo::NeatoController< ProtocolController >.
|
pure virtual |
Set or unset the test mode.
| testMode | True for setting the test mode. |
Implemented in regilo::NeatoController< ProtocolController >.
 1.8.11
1.8.11 
